



已阅读5页,还剩1页未读, 继续免费阅读
版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
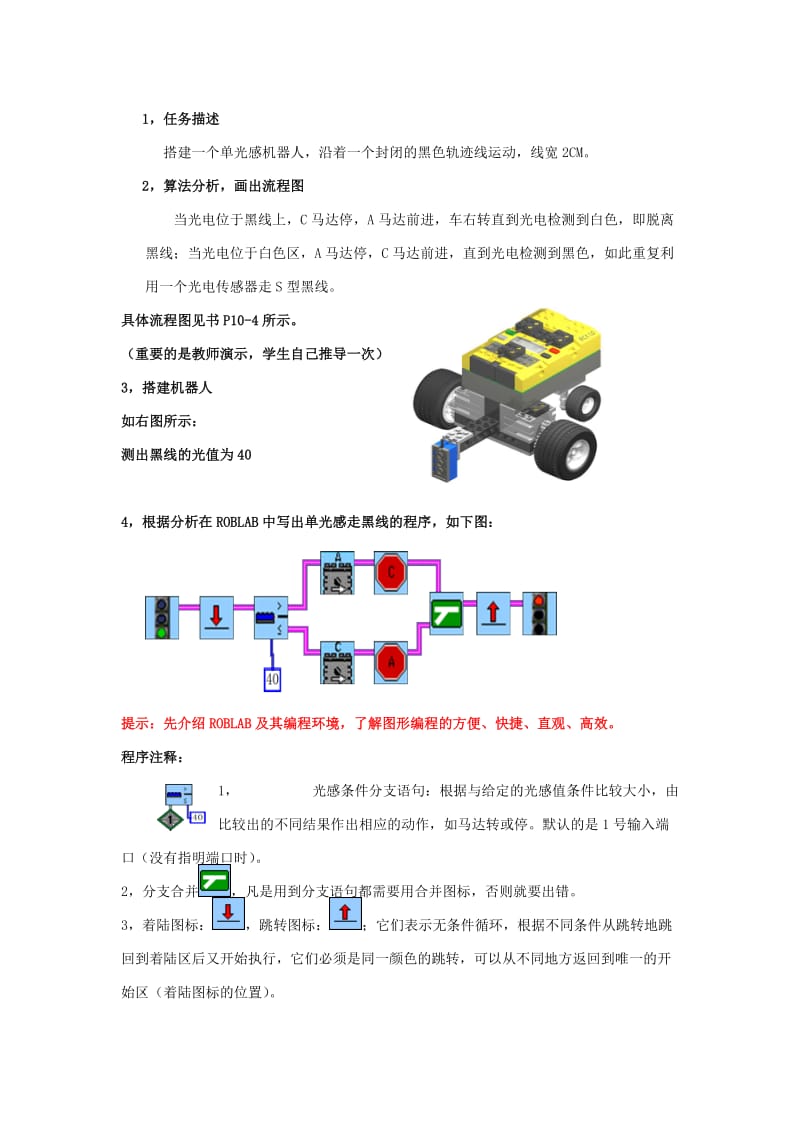
第10课轨迹机器人教案绵阳中学苏远龙教材分析1教材概况本节课是知识缧旋性上升中的综合性知识的一部分,在前的几节课中我们学习了关于机器人主机、传感器,并用实验完成了机器人走迷宫的项目任务,在此基础为了加快学习步伐我们介绍了在仿真环境中如何构建一个机器人来完成我们自设的任务,有了这些知识,我们巳对机器人的相关知识有了深入的了解和掌握,在此基础上我们学习本节的沿着某一特定路线运动的轨迹机器人,让我们的知识进一步深化;在学生的创造、创新、综合素质方面可以进一步的体现。教学目标知识与技能学习乐高的光电传感器;搭建一个轨迹机器人,在图形编程方式下完成走轨迹;学习图形编程语言(ROBLAB)的条件分支、循环、容量的使用;过程与方法举例拓展视野,情景导入;作品分析,主题研究,巩固知识,提高应用所学知识解决实际问题的能力自主探究,并发现问题;总结方法,解答疑问。树立模范,利用活动组,形成比干追,对表现突出的给予一定的奖励。情感态度与价值观人人争做优秀2教学重难点重点乐高光电传感器的使用;轨迹任务的分析、流程图、编程,搭建一个轨迹机器人;ROBOLAB编程工具的补充介绍,并介绍其中的条件分支、容器、循环的使用。难点写流程图,编走轨迹程序;分支、循环、容器的使用。学生分析学生对此课非常感兴趣,但课堂中合作要加强,课后设备的整理、规范应形成习惯。教学过程一、关于轨迹机器人通常我们把沿着一定路线运动的机器人,叫做轨迹机器人。近年国际、国内各地组织的各级青少年机器人竞赛活动中,每一次竞赛活动轨迹机器人的活动项目是最多的。如,机器人滑雪,沿固定路线运动,机器人穿越障碍,机器人灭火等项目。轨迹机器人的共性是它是搭建、控制机器人沿着一定路线运动,识别场地中特定颜色标识,利用机械结构、应用传感器、编程控制的一项基础又具挑战性的机器人研究活动。现在请大家观看一些关于机器走轨迹的视频机器人营救,机器人灭火,单光感走黑线,小学滑雪,城市交通,打保龄球示例图示1目标通过视频让学生对轨迹机器有一个了解,为下面教学起到引领作用。二、乐高机器人的光电传感器通过上面的视频和学习,我们了解到了什么是轨迹机器人,轨迹机器人是挑战性很强的研究活动,各种活动都少不了用到一种让机器人来识别场地,辨识颜色标识的光电传感器,现在我就以乐高的光电传感器来给大家介绍一下。在前边的课程中我了解到光电传感器传感器相当于机器人的眼睛,那么再来学习一下光电传感器的知识乐高光电传感器原理和功能光电传感器机器人的眼睛,它是主要无件是一个发光二极管,有两个灯,工作时,一个灯发红光,一个灯不发光只接收反射回来的光线。在将其接在RCX的输入端口上,打开电源按下VIEW按钮,可以在RCX的LCD上读出当前的值,如书上图102所示,其值范围为(0100),光线越亮,值越大,反之越小。动手小实验1,把光电传感器接RCX的输入端口1,打开RCX,按下VIEW按钮,读出其LCD上的值。2,同一,用光电测出不同颜色的光值黑色反光值(50,蓝色反光值应40,43,红色反光值与白色接近,因其反光值是一样的。三、单光感走黑线发红光接收光1,任务描述搭建一个单光感机器人,沿着一个封闭的黑色轨迹线运动,线宽2CM。2,算法分析,画出流程图当光电位于黑线上,C马达停,A马达前进,车右转直到光电检测到白色,即脱离黑线;当光电位于白色区,A马达停,C马达前进,直到光电检测到黑色,如此重复利用一个光电传感器走S型黑线。具体流程图见书P104所示。(重要的是教师演示,学生自己推导一次)3,搭建机器人如右图所示测出黑线的光值为404,根据分析在ROBLAB中写出单光感走黑线的程序,如下图提示先介绍ROBLAB及其编程环境,了解图形编程的方便、快捷、直观、高效。程序注释1,光感条件分支语句根据与给定的光感值条件比较大小,由比较出的不同结果作出相应的动作,如马达转或停。默认的是1号输入端口(没有指明端口时)。2,分支合并,凡是用到分支语句都需要用合并图标,否则就要出错。3,着陆图标,跳转图标;它们表示无条件循环,根据不同条件从跳转地跳回到着陆区后又开始执行,它们必须是同一颜色的跳转,可以从不同地方返回到唯一的开始区(着陆图标的位置)。补充ROBLAB提供5种颜色的跳转,当要使用多出5种时,使用白色着陆和跳转图标,下面用相应的常数数值表示,如图所示,但一定要用同序号跳转图标。5,下载、调试机器人每一组同学下载程序到RCX中进行调试,看一看有什么问题能否走黑线成功率高吗6,程序的优化通过调试我们发现当前测的光感值40时能够大多完成任务,但随着时间和地点不一样,光值为发生变化,这样就不能走黑线了;那么我们有没有解决的办法,让机器人自己自动取得光值呢要想解决这个问题,我们必须引入一个容器概念,如下面几个图所示介绍一下容器的使用表示读出1号输入端口上的光电值,并把它赋值到红色容器中,相对于给变量赋值。表示给红色容器的值加上4后再赋给红色容器。表示光感分支图标的1端口的值与红红容器的值做比较,根据比较不同做出相应的动作。有了以上的知识新那么现在我们就来优化我们的程序吧。程序见书上P69图107所示,下载并重新调试,观察成功率是否高了。四、用双光感走轨迹1,问题展现,引出新课通过前面的实验和学习我们了解到单光感走一个闭合(没有交叉点)环路是非常成功的,现在我们在如书图1010所示的轨迹线运行,起点可以任地方,看能否成功实验3次。通过大家动手做,我们请几个组来介绍一下他们组的情况。我们发现几个组都有同样的问题,单走黑线没有交叉点时很成功,但一遇到交叉点和拐弯时,机器人就不知道走哪边了,机器人就乱走了,3次成功走完一次的都没有,请问是前面的程序不对吗不是。是环境光影响吗不是,可以走黑线。那是不是我们的机器人结构有问题呢,我们用什么方法来解决呢(同学讨论,提出看法、想法)2,解决问题的办法通过大家讨论和实践,我们需要重新分析任务、要求,改进不足。我们发现此任务中心仍是走黑线,只是有转弯和交叉点,这就是问题的所在。要解决它们,我们需要把光感位置改在车头的两边,用两只光电来判断黑线,也称为骑黑线法,方法是两个光电分别位于黑线两侧,当1,3号光电在白区或黑线上时,机器人前进;当1号光电在白色区,3号在黑线上,机器人右转;当1号在黑线上,3号在白区,左转;机器人的动作与光电的位置关系如图1012所示流程图为NYYNNY程序结束程序开始循环开始A,C前进1号光电红
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 中国工商银行个人住房借款抵押合同合集
- 专题3.3一元一次不等式-2021-2022学年八年级数学上册尖子生同步培优题典(原卷版)【浙教版】
- 【智乐星中考】2022年泰安市初中学业水平考试英语模拟(一)
- 2024年防爆电机项目招商引资报告
- 2024年文旅小镇行业企业战略风险管理报告
- 的股东大会通知书格式合集
- 2024年金刚石触媒材料行业企业战略发展规划及建议
- 2024年出口关税项目融资计划书
- 高血压患者护理查房课件1
- 单位广告制作合同书合集
- 东北三省三校2024年高三第三次模拟考试(三模)英语试卷(含答案)
- 2024年04月湖北十堰市郧阳区事业单位引进人才53人笔试历年高频考点试题附带答案解析
- 中国茶文化与茶健康智慧树知到期末考试答案2024年
- 安全防护用品购置计划表
- 教科版四下科学《植物的生长变化》单元解读(新教材解读)
- 某化工集团公司设备管理管理办法汇编
- 中考作文考前指导作文的审题立意公开课一等奖市赛课获奖课件
- 2009-2022历年甘肃省兰州市事业单位考试《综合基础知识》真题(其他类)含答案2022-2023上岸必备带详解版1
- 工程造价司法鉴定实施方案
- 基于plc的中央空调自动控制系统设计
- 超声科应急预案.ppt
评论
0/150
提交评论